Understanding Calculus...again
Tl;DR
Today Ive had a yearly meeting with a friend and it been f*** amazing.
Also, 10y back I was… better at calculus and worst at…
…dodging bullets from life (?)
Intro
The first time I got to know calculus, was with derivatives and integrals.
I (kind of liked) derivatives…but hated integrals.
Probably because of the lack of purpose that I was given.
I could not be more wrong at that point, as calculus is both: beautiful and useful
…if you get it explained properly.
The essence of calculus.
Laws of physics are explained with differential equations.
The series that 3Blue1Brown has made on the topic, are simply magestic: https://www.youtube.com/watch?v=p_di4Zn4wz4 and https://www.youtube.com/playlist?list=PLZHQObOWTQDNPOjrT6KVlfJuKtYTftqH6
Calculus Applications
The classic: the area under a curve!
Why would we want that?
Well, I can think already about few examples:
- For ML, the ROC and its AUC informs about how good a ML Classification algorithm performs
The Jacobian
This was very useful to do computational mechanics:

http://localhost:1313/mechanical-engineering-cool-stuff/
http://localhost:1313/gabemorris12-mechanism-project-setup/
http://localhost:1313/slider-crank-mechanism/
http://localhost:1313/chaos-theory-and-the-double-pendulum-with-python/
Gradients and Partial Derivatives
ODE - Ordinary Differential Equations
Ordinary Differential Equations!
The Double Pendulum
A double pendulum is typically modeled using a system of ordinary differential equations (ODEs), not partial differential equations (PDEs).
Special mention to KajeVDP that created this before LLMs: http://jakevdp.github.io/blog/2017/03/08/triple-pendulum-chaos/
Ordinary Differential Equations (ODEs): ODEs describe how functions of one independent variable change. In the case of a double pendulum, the independent variable is time. The dependent variables are the angles of the two pendulum arms (θ₁ and θ₂). We’re looking at how these angles change over time.
Partial Differential Equations (PDEs): PDEs describe how functions of multiple independent variables change. PDEs are used when the quantity of interest depends on more than one independent variable. For example, the temperature distribution in a metal plate depends on both time and position (x, y coordinates). This would require a PDE.
Why ODEs for the Double Pendulum?
The motion of a double pendulum is described by how the angles θ₁ and θ₂ change over time.
There’s no other independent variable involved.
The equations of motion are derived from Newton’s laws or Lagrangian mechanics, and they result in a set of coupled second-order ODEs:
d²θ₁/dt² = f₁(θ₁, θ₂, dθ₁/dt, dθ₂/dt)
d²θ₂/dt² = f₂(θ₁, θ₂, dθ₁/dt, dθ₂/dt)Where f₁ and f₂ are functions that depend on the angles, their first derivatives (angular velocities), and other parameters like the lengths and masses of the pendulum arms.
In summary:
The double pendulum is a classic example of a system that is accurately and effectively modeled using ordinary differential equations because the angles of the pendulum arms depend solely on time.
There are no spatial dependencies that would necessitate the use of partial differential equations.
PDE - Partial Derivate Equations
And these are not only useful for mechanical engineering, but for modelling heat transfer as well:
Conclusions
FAQ
Helping Others
After helping my friend who works as radiophysics and shipped its page at: box2overtake.com
I cant wait to see what this other friend will be able to share with the world with the proper platform.
Material science, diesel injectors, math and piano notes…
Again, I really cant wait:
- Post embrittelment about steel and H2
- Hyundai heavy industries dfy subscription making possible a company to thrive or to go bankrupt
- Stocastic vs unpredictable effects
- How about a progressive tax ob beauty?
- Models that work, compared to others with interesting assumptions
- https://en.wikipedia.org/wiki/Grigory_Feldman
- https://en.wikipedia.org/wiki/Feldman%E2%80%93Mahalanobis_model#Assumptions
- Doing real things…happen :)
https://www.youtube.com/shorts/sQ4SQQSr3vU
https://www.youtube.com/shorts/MEKctNGZHdU
https://www.youtube.com/shorts/b-lmkn_PObw
https://www.youtube.com/shorts/UKYFDvyLA28
In the meantime: you can also get your website going
 SelfHosted Landing Repo
SelfHosted Landing Repo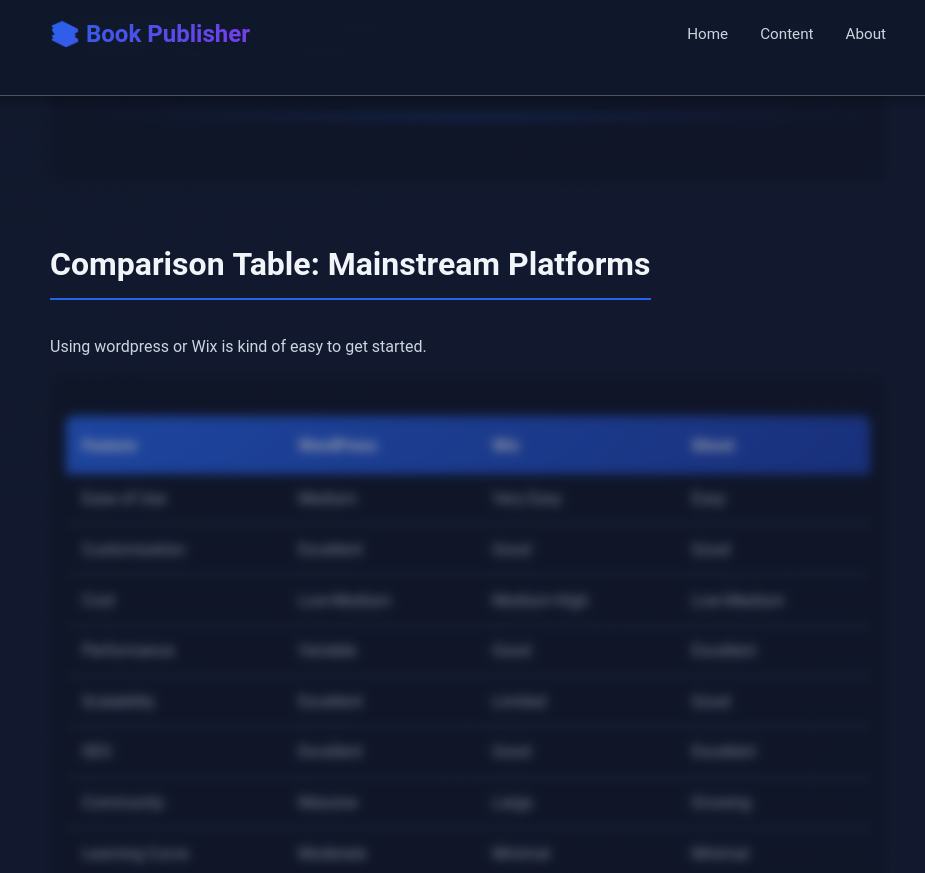 DIY webs via webook
DIY webs via webookOr watching some of the 101 sessions I had with people to get started.
The good thing about helping others, is that you get new ideas:
From team knowledge to internal chatbot knowledge.
Avoid silos. Build internal transparency and knowledge sharing.
Placed together the idea draft at the bot x KBs docs
If during next year ill get good enough at ads, this will definitely be sth to consider in the offering via PaaS