Cloud vs Pi's: What Should I get?
Time to choose - where is it worth to do SelfHosting?
Analysis paralysis - Choosing Small Factor Computer
Sometime ago, I was doing some benchmarks about Raspberry Pi vs Orange Pi and also about Mini PCs vs those SBC.

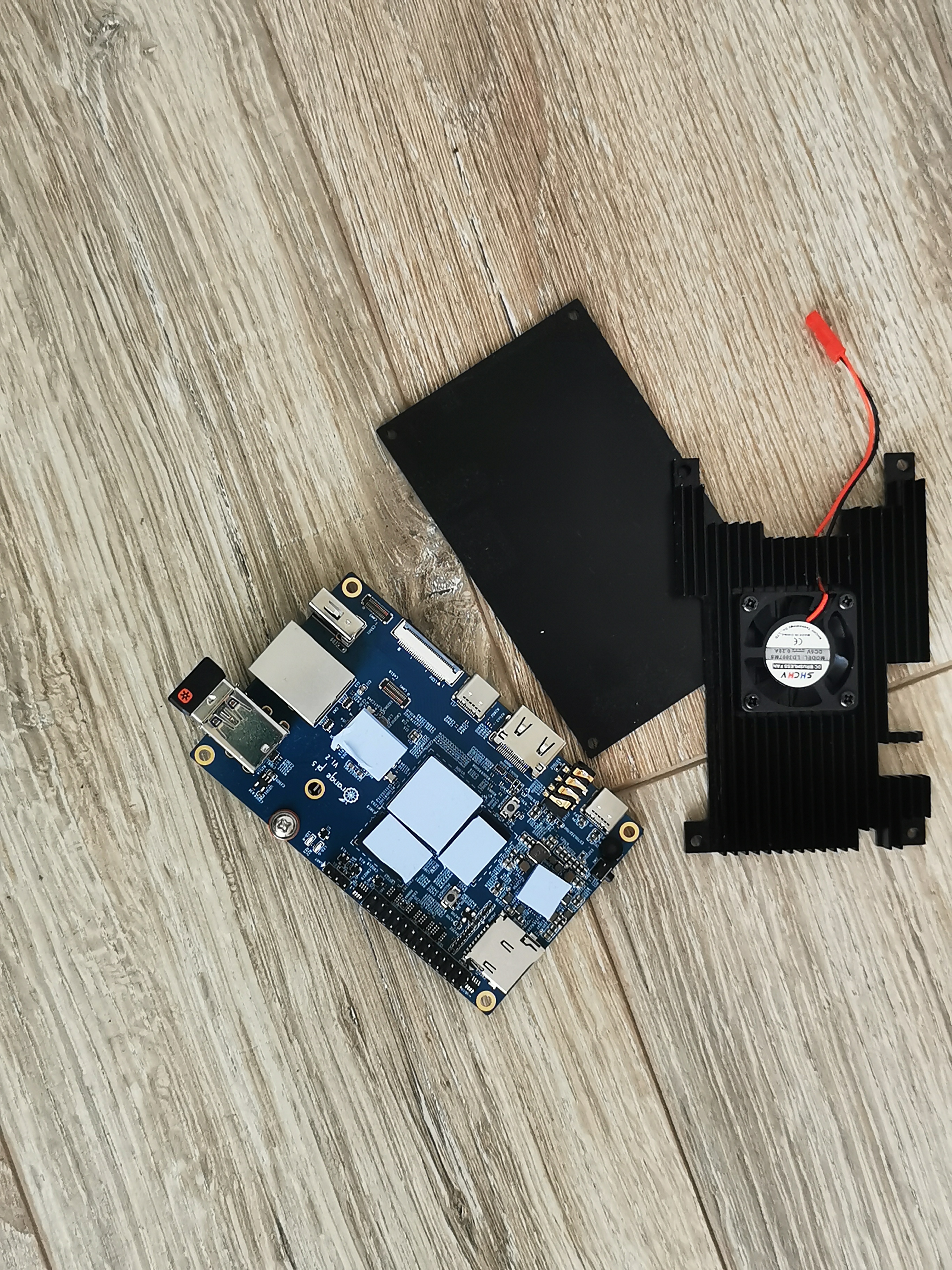
Mounting the passive+active cooling to the Opi:
Lately, I have been giving a try to cloud providers.
Particularly, to Hetzner.
Is it really worth to SelfHost on our own hardware?
Or can we just use a Cloud Server for similar performance/price?
This is what we will be looking at today:
- BMax B4
- Raspberry Pi 4’s (2GB and 4GB)
And make some conclusions
Asrock X300 and the BMAX B4
The Asrock has 1.92L (155 x 155 x 80 mm) size in volume, and the BMax just 0.6L.
What am I doing talking in liters?
- 1.92L are about 1922 cm³ - Similar to the displacement of a regular car
- 0.6L are ~ 600 cm³
Yes, they both are veeery compact.
You can have a reference a very popular referece, a pen:

The RAM is not soldered in the BMAX B4, and also you can add an additional 2,5 drive (screws not included).

Single Board Computers
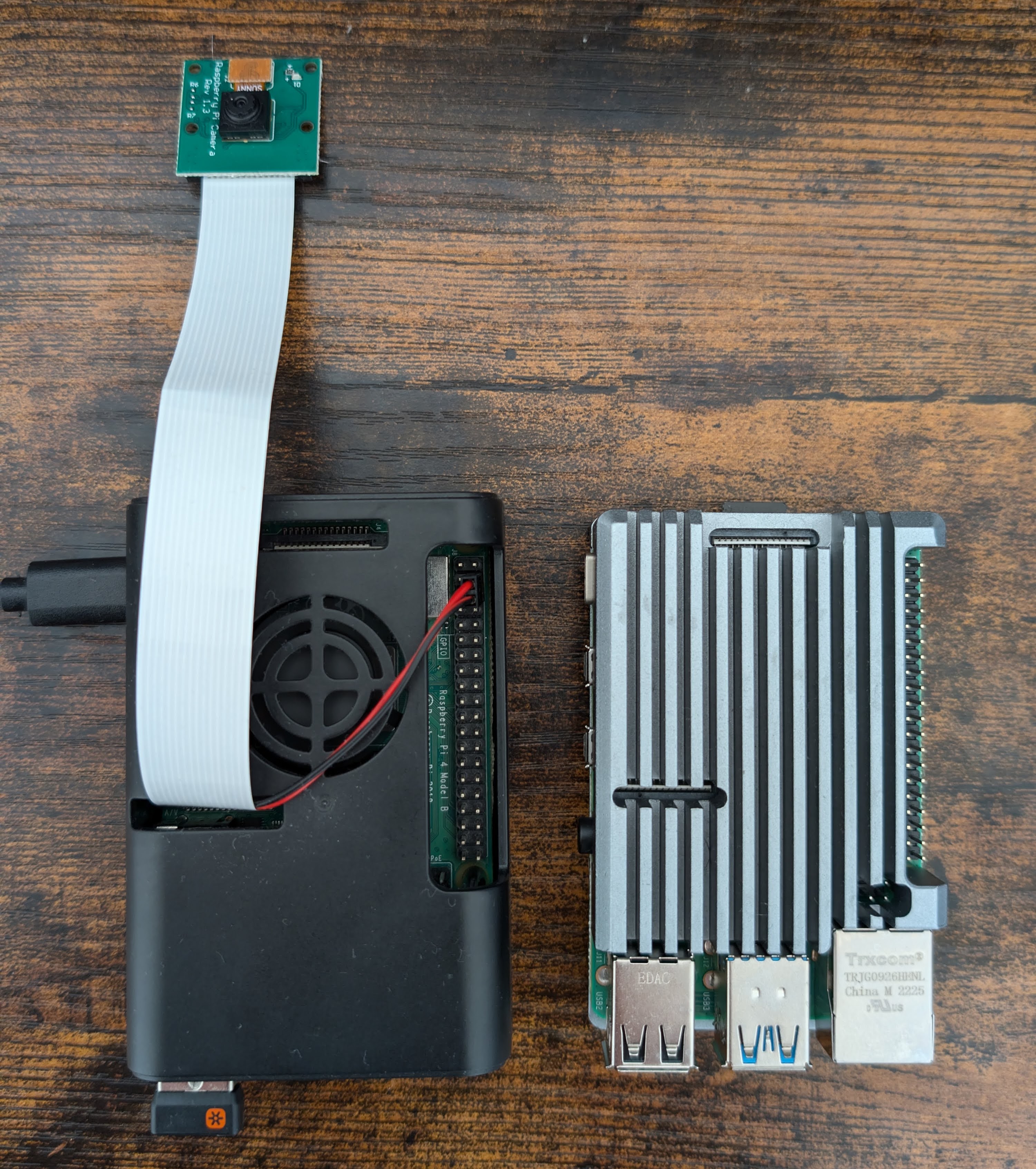
And also, I got a new Raspberry Pi 4 (this time 4GB - ARM64)
Now that prices are reasonable:
There is a bunch of information on the internet: reddit, youtube and decided to create this post as both, a systematic guide and the results of testing that I could perform.
- What I the testing results include:
- Raspberry Pi 4 2/4GB
- Raspberry Pi 5 8GB
- Orange Pi 5 8GB
- BMAX B4
- Hetzner Cloud - Amazing internet speed…
Big Thanks to Alex 🙌 - For sharing the results of the Raspberry Pi 5 8GB
Power Consumption and Temps
| Device | Idle Power | Max (Power & Temp Seen) | Power Adapter | Yearly 🔌 Cost (USD) |
|---|---|---|---|---|
| Raspberry Pi 4 | ~2/3w | 6W | 5V 3A | ~$5 |
| Orange Pi 5 | ~3/5~W | 8W, 80°C | 5V 4A | ~$8 |
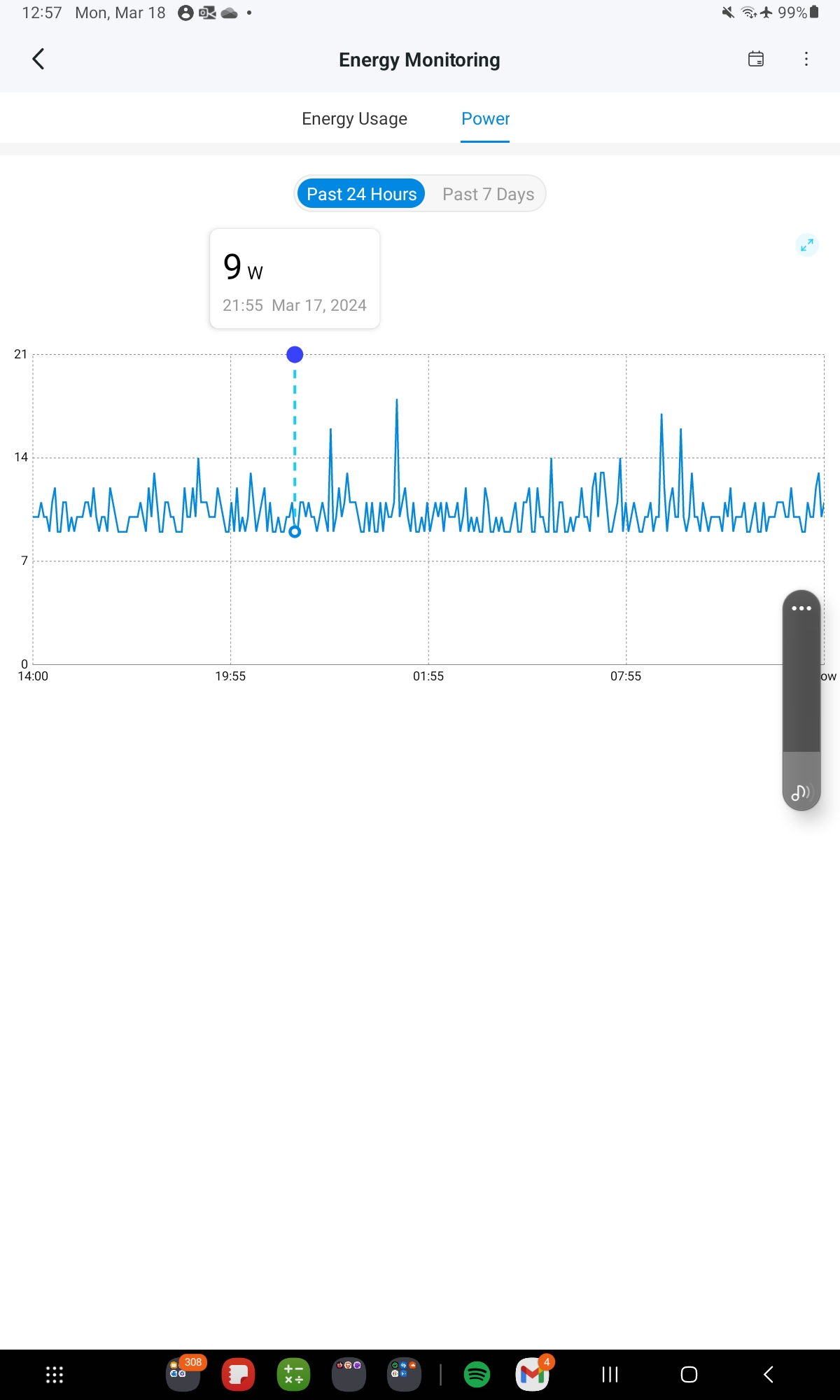
| BMAX B4 | 9W | 18W & 64°C, fan | - | ~$14 |
See what I captured with the P110:
Disabling Wi-Fi improves power efficiency.
On the BMAX B4 by ~10% (~1W).
- Calculation of energy costs:
- Annual kWh = Idle Power in Watts × 24 hours/day × 365 days/year ÷ 1000 (to convert W to kW)
- Cost = Annual kWh × Cost per kWh (USD)
At the time of writing, I pay ~0.2$/kWh
You can say that in terms of energy, having one SBC 24/7 is like a month of cloud or 2 months if you consider the BMax.
GPIO
No discussion here - The Raspberries are the absolute winners.
Also in software support.
I have to comment that I prefer BullsEye over Bookworm for the Pi’s for IoT/CV Projects
OrangePi 5 with Latest Kernel 📌
- Installing OS with latest kernel thanks to Joshua-Riek
- Remember that they are not the official ones!
- I have tried the 6.1.75 version, which has HDMI support working
- Other 3rd party images: Armbian
- You can boot RPi5 from NVMe like so
- The SD card will still have the boot priority (if it’s there)
Computing vs Volume
| Device | CPU | GPU | RAM | Dimensions |
|---|---|---|---|---|
| Raspberry Pi 4 | Broadcom BCM2711 Quad-core (4x ARM Cortex-A72) | VideoCore VI @ 500mhz | 2/4 GB | 85.6mm × 56.5mm × 17mm (0.082L) |
| Orange Pi 5 | Rockchip RK3588S (4x Cortex-A76 @ 2.4GHz + 4x Cortex-A55 @ 1.8GHz) | Mali G510 MP4 | 8 GB | 100mm × 62mm × 18mm (0.112L) |
| BMAX B4 | Intel N95 (x4 cores Alder-Lake) | - | 16 GB | 12.5 x 11.2 x 4.4 cm (0.608L) |
- It’s very important to use proper adapter or you will risk the SBC and its performance
- The Amperes [A] info on adapters is the MAXIMUM they can deliver at a given voltaje [V]
- The devices will ask for less current if they dont need that much
Testing Results
Synthetic CPU Benchmarks
Sysbench
Results - SysBench 📌
| Device | CPU Benchmark (4 threads) | CPU Benchmark (8 threads) |
|---|---|---|
| Raspberry Pi 4 2GB | ~1.7k events | - |
| Raspberry Pi 4 4GB | ~28k events | - |
| Orange Pi 5 | ~38k events | ~50k events |
sysbench --test=cpu --cpu-max-prime=20000 --num-threads=4 run7zip
Results - 7ZIP 📌
| Device | Tot (4 threads) | |
|---|---|---|
| Raspberry Pi 4 2GB | 1622/6311 | |
| Raspberry Pi 4 4GB | 1442/5508 | |
| Raspberry Pi 5 8GB | 2.7k/10k | |
| Orange Pi 5 | 2.7k/11.8k |
7z b -mmt4Docker Build Time
Results - Building Docker Image for Trip-Planner 📌
- I love using Docker for SelfHosting
| Device | Docker Build | Max Temp | Peak Temp (Docker Build) | Avg Temp (Docker Build) |
|---|---|---|---|---|
| Raspberry Pi 4 2GB | ~3672s | - | ~46°C | ~39°C |
| Raspberry Pi 4 4GB | ~3480s | - | - | - |
| Orange Pi 5 | ~1777s | 80°C | ~65°C | ~50°C |
| BMAX B4 | ~45 seconds | 64°C fan | - | - |
The Hetzner x4 SkyLake and 8GB RAM provides similar performance to the BMAX (when used to build the trip-planner container image).
- Hetzner Shared vCPU (2x Skylake @2ghz) 4GB ~77s
- Hetzner Shared vCPU (4x Skylake @2ghz) 8GB ~45s
Astral-SH Build Time
A comparison between the SBCs and Hetzner.
Building Astral-SH 📌
| Platform | opi | rpi4b 2gb | RPi 5 8GB | Hetzner |
|---|---|---|---|---|
| Build Time | 5min 20s | 10min 7s | 4min 30s | 6min 15s |
I have to mention that the Alex have way faster internet connection than me - which may influence this result
Conclusions
You have other options for hosting services, in the cloud:
For AI workloads you will be interested in some cloud GPU:
FAQ
Testing CPU Performance - SysBench, TripPlanner, build Astral-sh…
#cat /proc/cpuinfo
#uname -a
#nproc
sudo apt install sysbench -y
sysbench --test=cpu --cpu-max-prime=20000 --num-threads=4 run- 7zip
sudo apt-get install p7zip-full
7z b -mmt
7z b -mmt4
7z band with 7zr:
7zr b -mmt1- Trip Planner docker build time:
git clone https://github.com/JAlcocerT/Py_Trip_Planner/
cd Py_Trip_Planner
sudo bash -c 'time docker pull python:3.8' #let's remove the time of downloading the Python base image from the equation, it was ~1 min!
#docker build -t pytripplanner .
sudo bash -c 'time docker build --no-cache -t pytripplanner .'
#sudo bash -c 'time podman build -t pytripplanner .'- Astral-sh Python Dependency Manager:
apt install cargo
#cargo install --git https://github.com/astral-sh/rye rye
time cargo install --git https://github.com/astral-sh/rye rye- Just simple stress test:
sudo apt-get install stress-ng
sudo stress --cpu 8 --timeout 120Testing Internet Connectivity
ip addr show
hostname -I
#sudo apt-get install net-tools
#ifconfig
ping -c 4 192.168.3.1 #gateway
ping 9.9.9.9 #quad9sudo apt-get install dnsutils -y #dns resolution
nslookup github.com
dig google.comsudo apt-get install speedtest-cli
speedtest-cli #speedtest-cli --simplecurl -sS https://ipinfo.io/json #the command to use
curl -sS http://ip-api.com/json/ #provides info about country, ISP, ...
curl -6 ifconfig.me #ipv6 info Measuring Temperature with NetData 📌
version: '3.8'
services:
netdata:
container_name: netdata
image: netdata/netdata:v1.25.0 #https://hub.docker.com/r/netdata/netdata/tags
ports:
- '19999:19999'
volumes:
- netdataconfig:/etc/netdata
- netdatalib:/var/lib/netdata
- netdatacache:/var/cache/netdata
- '/etc/passwd:/host/etc/passwd:ro'
- '/etc/group:/host/etc/group:ro'
- '/proc:/host/proc:ro'
- '/sys:/host/sys:ro'
- '/etc/os-release:/host/etc/os-release:ro'
restart: unless-stopped
cap_add:
- SYS_PTRACE
security_opt:
- apparmor=unconfined
volumes:
netdataconfig:
netdatalib:
netdatacache:How to BackUp Properly
Whatever option you choose - make sure to have proper backups setup.
Why? I had to recover Portainer data the hard way…
sudo fdisk -l #get the drive
sudo mkdir /mnt/portainer_backup
sudo mount /dev/nvme0n1p2 /mnt/portainer_backup #mount the drive
#it was installed in the other drive with:
#sudo docker run -d -p 8000:8000 -p 9000:9000 --name=portainer --restart=always -v /var/run/docker.sock:/var/run/docker.sock -v portainer_data:/data portainer/portainer-ce
sudo docker volume create portainer_data
sudo cp -r /mnt/portainer_backup/var/lib/docker/volumes/portainer_data/_data/* /var/lib/docker/volumes/portainer_data/_data/
sudo docker run -d -p 8000:8000 -p 9000:9000 --name=portainer --restart=always \
-v /var/run/docker.sock:/var/run/docker.sock \
-v portainer_data:/data \
portainer/portainer-ce #now you can re-use your portainer, as it wasHow to mount external drives consistently!
lsblk #list them again
lsblk -f /dev/sda1 /dev/sdb2 #see the format and the UUID of a couple of blocks
df -h /dev/sda1 #you will see if its mountedsudo apt install ntfs-3g
sudo nano /etc/fstab #forever
UUID=some-uuid /mnt/data_ntfs_500 ntfs-3g defaults,uid=1000,gid=1000,umask=0022 0 1
UUID=some-uuid-of-your-drive /mnt/ext4_mount_point_folder ext4 defaults 0 1For a one time setup:
sudo mkdir -p /mnt/data_ntfs_500
sudo mount -t ntfs /dev/sda1 /mnt/data_ntfs_500/ #example with ntfs
sudo mkdir -p /mnt/data_ext_2tb
sudo mount -t ext4 /dev/sdb2 /mnt/data_ext_2tb/ #example with ntfsHow to use a RPi - Without a RPi
A raspberry Pi inside a container - https://github.com/ptrsr/pi-ci
A Raspberry Pi emulator in a Docker image that lets developers easily prepare and flash RPi configurations.
Cloud Interesting Resources
https://www.youtube.com/watch?v=jYIgcdIW1yk
I also had this saved (credits to BasvanKaam)