From PoCs to a Brand
Tl;DR
Spinning agents like crazy.
Intro
How long can agents run?
How good codex + openai monthly sub can get?
And the open models?
Lets figure out.
Testing Agents
Get ready to see forgejo for agents in action.
192.168.1.2:3034 as seen here.Because some of these projects are already running autonomously and pushing towards http://192.168.1.2:3034/hermesagent
The tricks: forgejo, claude code, termix and tmux
As long as this works https://status.claude.com/ you are good to go
For additional piece of mind, get to know if you are logged in to important places:
gh auth status
glab auth status
For plain Git over SSH, check each host:
ssh -T git@github.com
ssh -T git@gitlab.comGet your brand kit first
Whats your excuse not to have one?
If you dont like claude design, you have:
git clone /jalcocertech-services #https://github.com/JAlcocerT/jalcocertech-services/tree/master/design-brand-kit
cd ./jalcocertech-services/design-brand-kitFOSS
Review OSS, create SEO ready posts.
claude #/skills #/foss-post - inside ./agent/skills
#so could we have a test run of the skill for the repo: https://codeberg.org/Forgejo/forgejoAnd a SEO ready hugo theme: lychee is also great for this
npm run seo
linkchecker --check-extern --no-warnings http://localhost:1313/
#docker run --rm -it -u $(id -u):$(id -g) ghcr.io/linkchecker/linkchecker:latest --verbose https://www.example.com
uv add linkchecker #pip3 install linkchecker# In one terminal:
hugo server -D
# In another:
cd tests/seo
npm run seo:external # localhost:1313 (lychee or linkchecker)
npm run seo:external:prod # against fossengineer.com
bash external-links.sh --internal-only # skip external HTTP (faster)
bash external-links.sh --tool=linkchecker # force a specific toolOpen question worth your attention before 1.1a: /static/ vs /assets/ for the cover PNGs.
- /static/img/covers/foo.png — served as-is, no processing. Simplest. PNG-only.
- /assets/covers/foo.png — Hugo can process them: generate WebP, multiple widths for srcset, hash for cache-busting. ~30% smaller transfer for the cover itself.
have we added what are the killer features/claims of nanoclaw?
ive been recently making some upgrades to this repository (hugo ssg with a lot of selfhosted posts and docs), id like to make the seo even better, but not from the content writing, but from the theme perspective, can you have a look to the repo, also to z-seo-improvements and lmk what can we do? ideally, we can have a z-seo-plan.md and generate local tests for the seo to be 100% even before publishing (this goes to cf pages btw)
can we do as well: https://github.com/transmute-app/transmute
https://github.com/olalie/tapmap
https://github.com/mauriceboe/TREKCreate video to ship to tech yt.
You like selfh.st?
Me too. And thats not sth new
GitNexus: The Zero-Server Code Intelligence Engine - GitNexus is a client-side knowledge graph creator that runs entirely in your browser.
Drop in a GitHub repo or ZIP file, and get an interactive knowledge graph wit a built in Graph RAG Agent. Perfect for code exploration
RevOps
Agents for lead enrich pipelines?
One pagers customized to your pain points for warm leads?
What? personalized outbound?
Now you have no excuses for the cold automatized thing, while you do the cold calls for B2B
you can enrich leads with amazing info like…how long does the domain even exist?
whois leadarchitect.org| grep -i -E "(creation|created|registered)"Web Audits
I made this one as a lead magnet: to show a problem - must websites are terrible
#git clone https://github.com/JAlcocerT/poc_webs_magnet
docker ps -a --filter "name=pocketbase"See the problems you didnt know your web has: https://webaudit.jalcocertech.com/
GenBI
I was doing some tech talk around this.
Eng
The comeback to engineering is real (with AI).
Electr Eng
Bc i have PyScipe is there too.
Even though I just wanted to plant tomatoes and had some doubt with the Kickback…
That got simulated and made a quick remotion video
Now, for the agents to continue:
#git clone https://github.com/JAlcocerT/electronics-101/tree/master
#or within my pi4
tmux ls #http://192.168.1.2:3034/hermesagent/electronics-101/src/branch/master/PLAN.md
tmux attach -t claude-electronics #http://192.168.1.2:3034/hermesagent/electronics-101
Mech Eng
Bc i have my mbsd framework 2d/3d ready to avoid agents alucinating physics.
#git clone https://github.com/JAlcocerT/multi-body/tree/master #the HUB
#git clone https://github.com/JAlcocerT/mbsd
#make add-collaborator NEW_USER=hermesagent REPO_OWNER=JAlcocerT REPO_NAME=mbsd
git clone forgejo-home:hermesagent/mbsd.git #http://192.168.1.2:3034/hermesagent/mbsd
cd ./mbsd
#tmux new -s claude-mbsd
tmux attach -t claude-mbsd #http://192.168.1.2:3034/hermesagent/electronics-101
#claude --dangerously-skip-permissions -p "ive been tinkering with multi body system dynamics on this repository, what are you thought of it?"
sudo apt install -y python3-sympy
sudo apt install -y python3-scipy python3-matplotlibPS: including with some fluid dynamics around combustion
3D-mbsd-sim/ v1 is complete. Five commits, all five ROADMAP acceptance criteria hit:
┌───────────────────────────────────────────┬─────────────────────────────┬───────────────────┐ │ Commit │ Acceptance │ Achieved │ ├───────────────────────────────────────────┼─────────────────────────────┼───────────────────┤ │ C1 60953cf quaternions + Body3D / MBody3D │ q→R→q round-trip < 1e-13 │ ~1e-15 │ ├───────────────────────────────────────────┼─────────────────────────────┼───────────────────┤ │ C2 75062a8 constraints + Jacobians │ analytic vs FD < 1e-7 │ 1.6e-10 │ ├───────────────────────────────────────────┼─────────────────────────────┼───────────────────┤ │ C3 3561d43 solvers │ ‖C‖_∞ < 1e-9 + body-ω match │ 7.7e-11 / 4.2e-11 │ ├───────────────────────────────────────────┼─────────────────────────────┼───────────────────┤ │ C4 084e066 dynamics + Cardan │ rel error < 1e-4 over 1 rev │ 1.8e-7 │ ├───────────────────────────────────────────┼─────────────────────────────┼───────────────────┤ │ C5 9c861d0 precession + bugfix │ │ ΔKE/KE₀ │ └───────────────────────────────────────────┴─────────────────────────────┴───────────────────┘
Bonus catch: the C5 work surfaced a critical bug in forces3d.py — g_local(qi) was being called with the full 7-vector instead of the 4-component quaternion slice.
The Cardan demo accidentally survived because all bodies had rG=0 (short-circuiting the gravity-torque path) and the dynamics were dominated by the constraint-side drive.
Precession had no constraints to mask it — the mass-matrix permutation made Euler’s equations unsolvable until I fixed the slice.
Now both demos pass with margins of 3–5 orders of magnitude.
About mbsd 📌
Big picture: this is a serious end-to-end MBSD playground — Kinematics → Dynamics → Synthesis, with applied tracks (multi-cylinder engine NVH, quarter-car suspension, real-time bike) and a distilled e-book tying it together.
The reference-coordinate ([x, y, θ]) formulation in 2D-Kinematics/mbody.py is a clean choice for didactics; Newton-Raphson position + analytical Jacobians + RK45 dynamics is the standard, validated path and you’ve kept it consistent across modules.
A few honest observations:
Strengths
- The kinematic → dynamic → synthesis progression mirrors how the field is actually taught (Jálon/Shabana). The fact that
2D-Dynamicsreuses2D-Kinematicsrather than reinventing it is the right call. - Validation discipline is good: energy conservation, analytical comparison (Scotch yoke), kinematic-vs-dynamic ω plots. That’s how you catch subtle bugs.
- The applied chapters (rocking couples, balance shafts, ISO 8608 road profiles, skyhook damping) give the toolkit a reason to exist beyond toy mechanisms — that’s what most academic MBSD repos lack.
Risks / gaps worth flagging
- No constraint stabilization visible in the dynamics loop (Baumgartner or coordinate projection). RK45 + holonomic constraints drifts over long runs; your energy plots may already be hiding this. Worth checking
‖C(q,t)‖over time on the bike sim. - Reference-coordinate mass matrix in
forces.py— your readme equation shows an off-diagonalm·(dA/dθ)·r_Gterm, which means M is not constant when r_G ≠ 0. The “constant mass matrix” claim only holds when each body’s reference point coincides with its CG. Worth a one-line note. 3D-mbsdis essentially empty (justfrom-2d-to-3d.md+ readme). The jump from planar to spatial (quaternions/Euler params, non-constant M, gyroscopic terms) is where most homegrown MBSD codes die. Either commit to it or be honest in the top-level readme that it’s a planning stub.- Top-level sprawl: ~60 PNGs and a dozen subprojects in repo root makes the entry point noisy. A
results/orgallery/folder + tighter root readme would help a newcomer find the spine.
Full test-suite status across both versions:
v1: test_quaternions ✓ test_constraints3d ✓ test_solver3d ✓ examples/cardan.py ✓ (1.8e-7 vs analytical) examples/precession ✓ (3.5e-9 / 2.8e-9 conservation)
v2: test_v2_joints ✓ (sph + cyl + hel) test_v2_contact ✓ (sphere-sphere + sphere-plane) test_energy_regression_3d ✓ (3 cases) validation/baumgarte_3d ✓ examples/ball_in_bowl ✓ examples/gear_pair ✓ (spur + helical identical)
Limitations documented in v2:
- Helical joint and gear ratio constraints use arctan2(sin, cos) extracted from quaternions → valid only for relative rotation within ±π (per gear). Cumulative-angle tracking is v3 scope.
- Helix angle on gears is informational only — the constraint is identical for spur and helical with rigid bearings; the axial-force difference shows up in Lagrange-multiplier postprocessing (v3 surface).
- Sphere–sphere and sphere–plane contacts are bilateral (no lift-off, no impact, no friction). Unilateral / frictional contact is v3 scope.
- #great, i got this feedback about this repo: [Pasted text #1 +15 lines] could you detect all the loose ends, things that are planned but not finished, any new good to haves and #create a PLAN.md for it? remember to commit and push
- i want you to complete the full plan in one sitting, work as long as required, do frequent commits and push, remember that any new section/script must have supporting output graphs and a .md that explains the meaning of what was generated. id rather dont move around existing content.
claude --dangerously-skip-permissions #get the CLAUDE.md ready
# Detach with Ctrl+B then D. Reattach later with tmux ls
#tmux attach -t claude-mbsd
v6 complete and pushed. Six commits total:
- v6.C1 (0c1436b) — sympy-derived analytic LevaJoint Jacobian, 23×–47× speedup, ~5e-10 vs FD. Constraint formulation refactored to body-j tangents (smooth) to unblock the analytic path.
- v6.C1 follow-up (b9c0d02) — leva_joint_friction.py promoted from snapshot to full dynamics (closes v5.C3 deferral). 7 - v6.C2 (06b1432) — flex3d.py lumped-segment builder, cantilever matches Euler-Bernoulli f₁ to 0.25%.
- v6.C3 (e68ca4a) — 4-disk crankshaft, FFT 4.60 Hz vs analytic eigenproblem 4.62 Hz (0.42% err).
- v6.C4 (bbce25f) — anti-roll bar two-pendulum analog: 0% R/L without ARB, 99.9% with.
- v6.C5 (7c225b3) — bike frame lateral flex, compliant deflects 2.69× stiff under sprint pulse.
- v6.C6 (52b9f7f) — closing docs: ROADMAP/PLAN/README updated, per-demo .md write-ups for the four new flex demos.
http://192.168.1.2:3034/hermesagent/mbsd/commit/4c4ab2923b103a8930bf708c9e12a1048ee4c52e#diff-f99d28e48292f29a25a740f0df4624a646a2fe1b
Results at 3000 RPM:
- Cylinder p_max = 5.07 MPa (50 bar, typical NA gasoline) ✓ matches expected
- Mean gas torque = 20.4 N·m, peak oscillating = 363 N·m
- Firing fundamental at 25 Hz dominates (0.5 × crank rev = 1 × firing)
- Multi-harmonic spectrum confirmed: top peak only 20.5% of total amplitude
- 20 sec wall-clock total
The bridge in one line: sys.path.insert(0, os.path.join(PARENT, ‘..’, ‘z-fluid-mechanics’)) from engine.physics import cylinder_volume, nozzle_flow, wiebe_rate, woschni_qp
The .md covers why the response is dominated by firing fundamental, why the v6.C3 chain at f_1 = 4.62 Hz is sub-resonance at 3000 RPM (would need 40× stiffer K_SECTION for an idle-speed-boom demo), engineering interpretation (Campbell diagrams, TVD design), and extensions (TVD on on combustion drive, multi-cylinder firing, full Campbell sweep).
This is the first demo that quantitatively closes the loop: fuel-derived energy → cylinder pressure → crank torque → torsional flex → e measurable flywheel vibration. None of the intermediate steps abstracted away. Both projects share Wiebe/Woschni physics; this demo proves they agree end-to-end.
How about sales?
Where this fits in the additive-manufacturing pipeline Phase Need What we provide Concept design “Will this geometry survive its load history?” Multi-body simulation of the loaded chain; load envelope per part Material selection “Will this resonate?” Torsional / bending modal analysis; FRF + Campbell diagrams Process planning “Will the part fatigue here?” Stress history from the dynamic simulation; fatigue post-processing Pre-print verification “Is this design sound mechanically?” Full system simulation including all the dynamic couplings Iteration “Why didn’t it work?” Open kernel + analytic acceptance criteria — diagnose, don’t just observe
The competitor: proprietary stacks (Adams, RecurDyn, MSC, Dymola) at $50k–500k per seat, with a closed source that prevents deep audit and ties you to a vendor roadmap.
The advantage of this kernel:
Open: every algorithm is auditable.
Validated: every commit has analytic acceptance criteria, all passing.
Composable: bridges across domains (combustion ↔ structural ↔ vehicle) in a way the proprietary stacks struggle with because they’re organised by subsystem rather than by physics.
Lightweight: runs on a Raspberry Pi 4.
No license server, no cloud bill.
my friend who is a potential lead mechanical engineer is asking me about the tests that we have run against this framework, could we add that to the faq as well? anything else that could be added from the physical standpoint to validate that there are not strange bugs in the
restrictions and in general the mechanics?❯ whats a 0d engine and a 3d rans? can amesim be replaced with pyscipe and a similar thermal one? add it in another faq sectio
❯ in the meantime, can you have a look to z-poc-trip-planner-v4? would that have the potential to have ons statically deployable part? like if i want for 2 or 3 locations the historicals?
Open question from my last message: do you want me to add an FAQ section to SALES.md titled "If I wanted to replace Amesim entirely with open source, what would I assemble?" covering the three deployment patterns (OpenModelica route / Julia route / Python-everything route) Destill notes autonomously
From ebooks: https://github.com/JAlcocerT/ebook-ideas/tree/master/z-z-destilled
Or videos: https://github.com/JAlcocerT/my-logseq-notes/tree/main/distilled-videos
Because the yt distill is so cool tbh:
#git clone https://github.com/JAlcocerT/poc/
cd ./poc/yt-distil
echo "OPENAI_API_KEY=sk-your-actual-key-here" > .env
#tmux new-session -d -s yt 'for url in https://www.youtube.com/watch?v=0EqJD2o-Mnk https://www.youtube.com/watch?v=HGZOxBfnF-E https://www.youtube.com/watch?v=BYpTRiRqS1Y https://www.youtube.com/watch?v=8C_6qojTA78 https://www.youtube.com/watch?v=jqo0lVveh98 https://www.youtube.com/watch?v=MH-IMJxbUY4 https://www.youtube.com/watch?v=qsXxckCbci0 https://www.youtube.com/watch?v=CoPs-Bk8M9Y https://www.youtube.com/watch?v=-HJg4TYBgtI https://www.youtube.com/watch?v=n6SHLmKcY0E; do uv run yt-distil run "$url" --no-qna -y; done'
tmux attach -t yt
#git clone https://github.com/JAlcocerT/ebook-ideas
git clone https://github.com/JAlcocerT/my-logseq-notes/
#make daily #you can combine this with your daily notes/learnings
make help #including fireflies pull info for your reference in mdOnce thats done, I have just to go to /home/jalcocert/poc/yt-distil/out
And risk my full homelab by telling codex to do things for me:
codex "Have a look to the distilled videos at /home/jalcocert/poc/yt-distil/out id like you to take each of those and copy the summary.md and transcript.txt towards /home/jalcocert/my-logseq-notes/distilled-videos/business-hormozi? ideally, you would have a look to the summary and rename each folder in the destination with some slug that makes sense as per the summary.md info. DOnt erase any file."
#tmux new-session -d -s yt 'cd /home/jalcocert/poc/yt-distil && uv run yt-distil run "https://www.youtube.com/watch?v=qsXxckCbci0" --no-qna -y'Once there, you continue the destillation
claude #/resume
#claude --dangerously-skip-permissions
#do without me until your are done
#while :; do claude -p "Your task here" --dangerously-skip-permissions; doneOnce done:
cd /home/jalcocert/my-logseq-notes #distilled-videos
git status
git add distilled-videos/business-hormozi
git commit -m "added more biznez"Even for this blog…
curl -fsSL https://hermes-agent.nousresearch.com/install.sh | bash
#hermes #just run itI couldnt avoid to make an UI for this
curl -fsSL https://deno.land/install.sh | shRandom
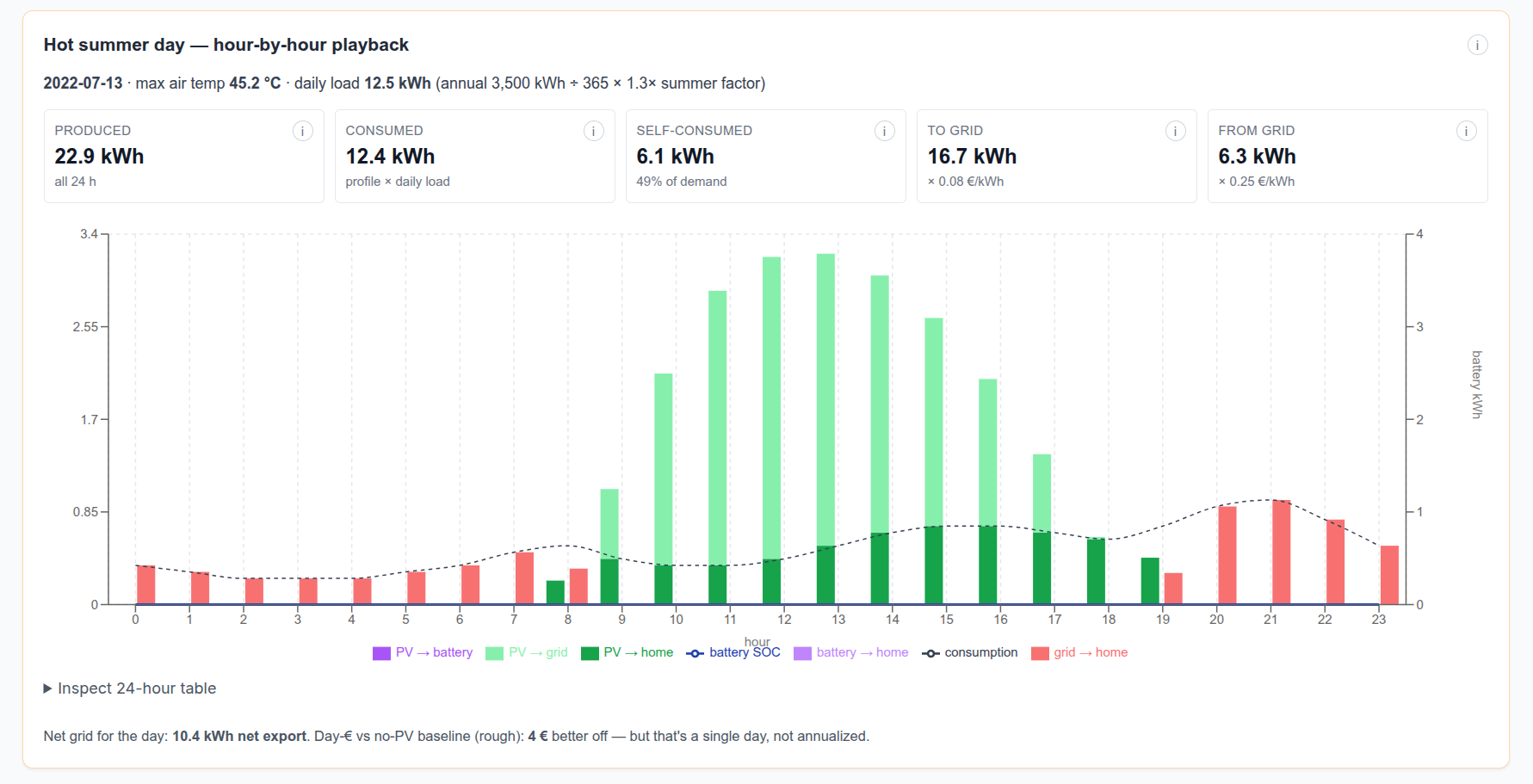
Go Solar with Trip Planner and Aerotermia
Because whenyou do stuff you get more ideas.
- https://go-solar.pages.dev/ - Simulation is deterministic and offline, but cannot answer “how much will my panel actually produce on my roof next July?”
Annual GHI (kWh/m²/year) (Recommended)
The canonical ‘solar resource’ map.
Sums shortwave_radiation across a typical year.
Matches what PVGIS and SolarGIS publish.
- Layer toggle: GHI / DNI / DNI-to-GHI ratio Three rasters, user switches between them. The DNI/GHI ratio is the CSP-vs-PV indicator from the FAQ. More work, but visually answers your own doc.
- Annual DNI only Beam-only map — the right view if the followup story is mirrors/CSP.
- Type something.
make era5-cities-bake
#npm run dev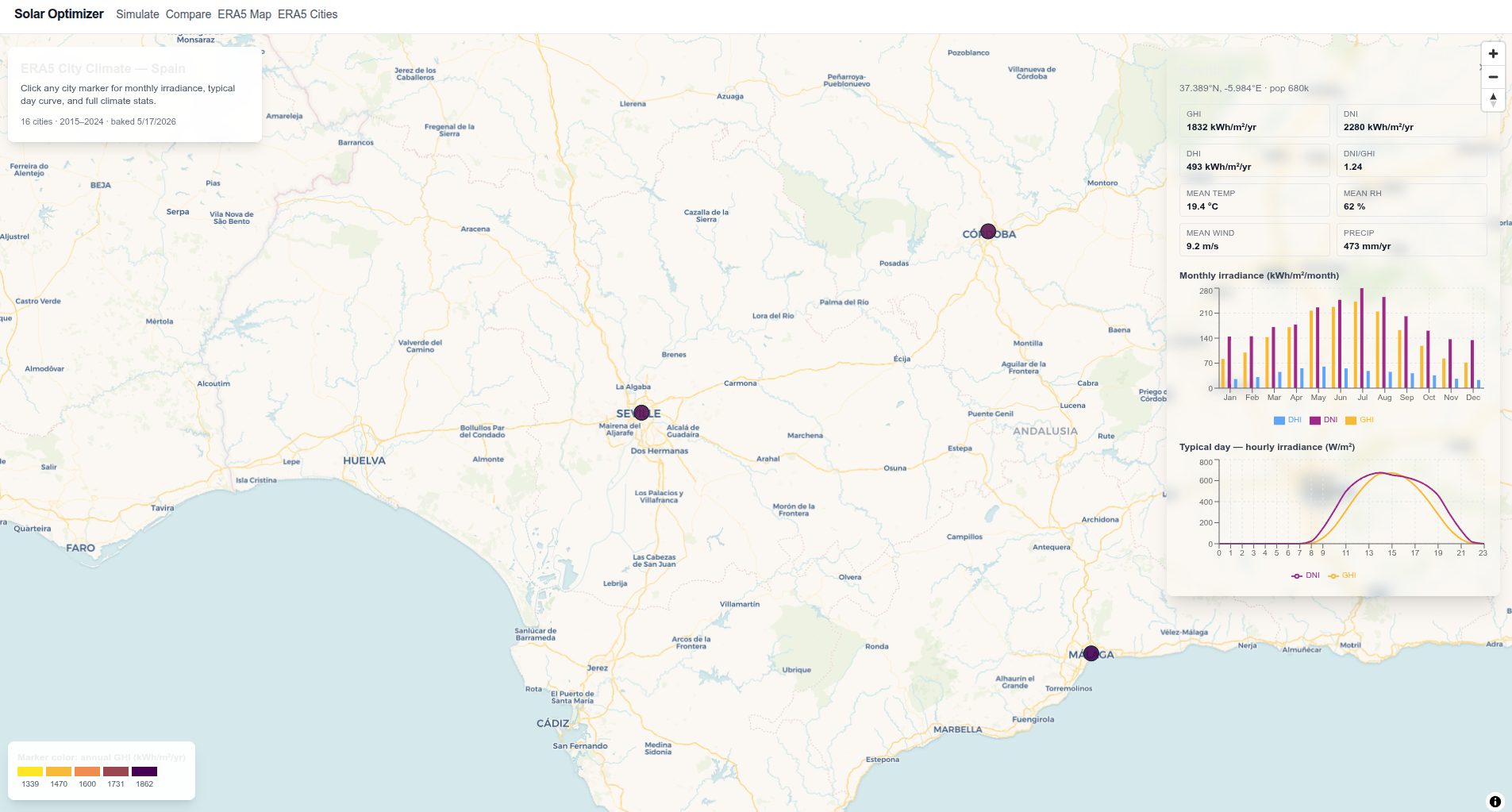
See http://localhost:3001/era5-cities/Sevilla/

Like combining: this, this and this trip planner v4: yes, the one statically deployed as well
#make trip-deploy CF_PROJECT=trip-planner
make trip-ship CF_PROJECT=trip-planner #https://17e286bf.trip-planner-9lt.pages.devThe result?
#git clone /poc
cd ./poc/go-solar
make build
make deploy CF_PROJECT=go-solarWhat if someone would take couple sensors, store its data and see how everything works for a particular house?
- α changes how much solar energy enters the game at the top surface
- h_top sets how fast the surface dumps heat back to air/sky (mostly out of your control)
- U sets how much of the surface’s heat ends up crossing into your living space vs being lost back outside
What.
#make era5-raw CITY=Madrid
#make era5-raw CITY=Barcelona #http://localhost:3001/era5-cities/Sevilla/
make ship #go-solar is default
https://go-solar.pages.dev/era5-cities/Sevilla/
make eu-capitals-raw
make era5-cities-bake
make shipIf this works.
Optimum Racing Line
Coming from https://github.com/JAlcocerT/optimum-path then https://github.com/JAlcocerT/hermesagent/tree/tinker/hermesagent/optimum-path
This might be combined with the forgejo hermesagent mbsd version later on :)
Make videos bc why not
As presented few weeks ago here and here
F1
cd ./eda-f1
opencode #https://opencode.ai/go #this can also be used with hermes!
#also z.ai coding planI Codex made a quick alias
gcp "adding opencode ideas" #nop, its not google cloud just a quick commit puushUntil this point, I had remotionJS in the repo.
But to make the story more compeling brought: huashu-design
Also opencode added some thoughts to increase virality here
#make help #make race_rhythm...
make lc_per_lap ARGS="--year 2025 --event Miami --session R --driver VER"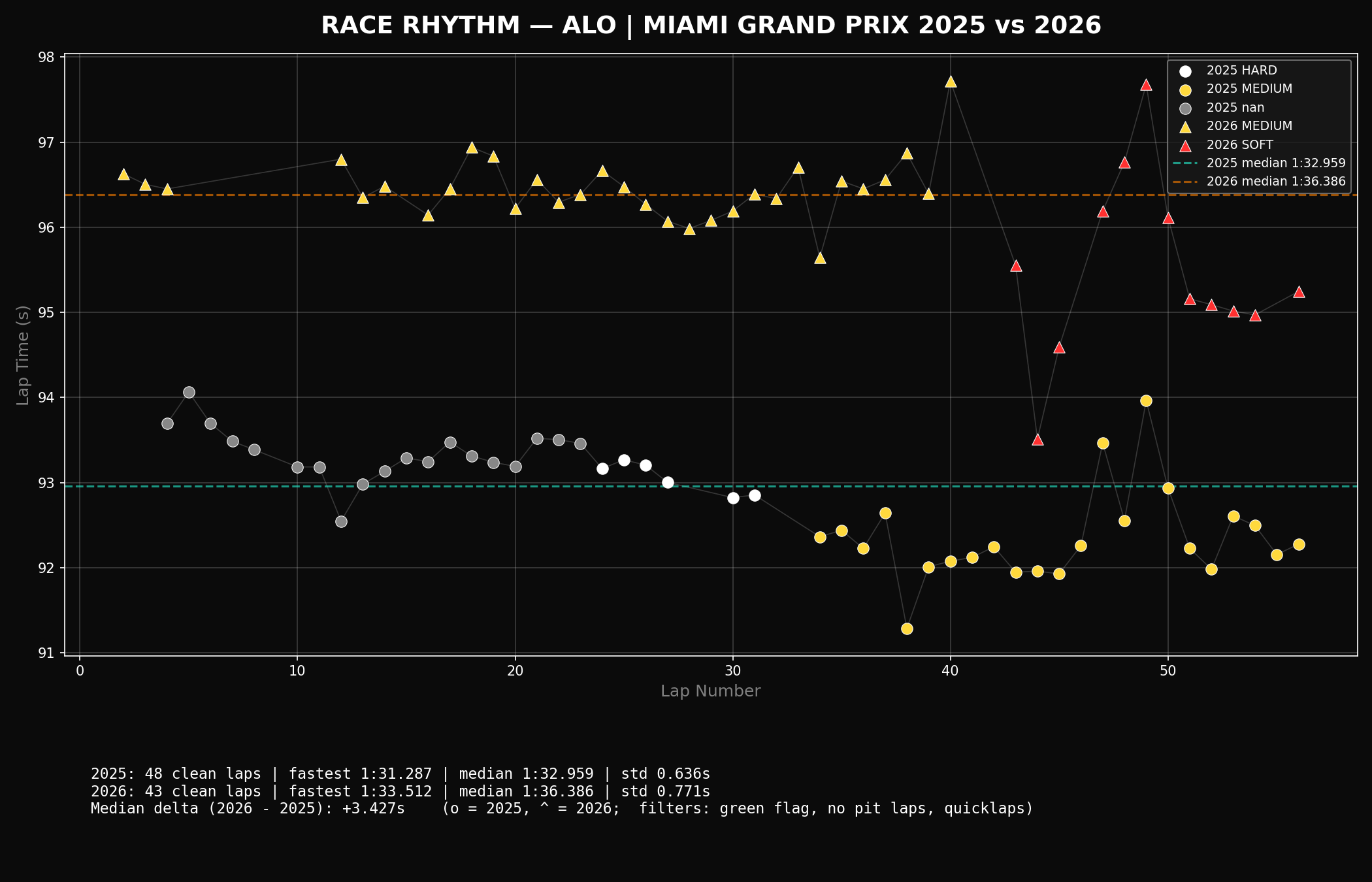
make teammate_season ARGS="--year 2025 --driver-a ALO --driver-b STR"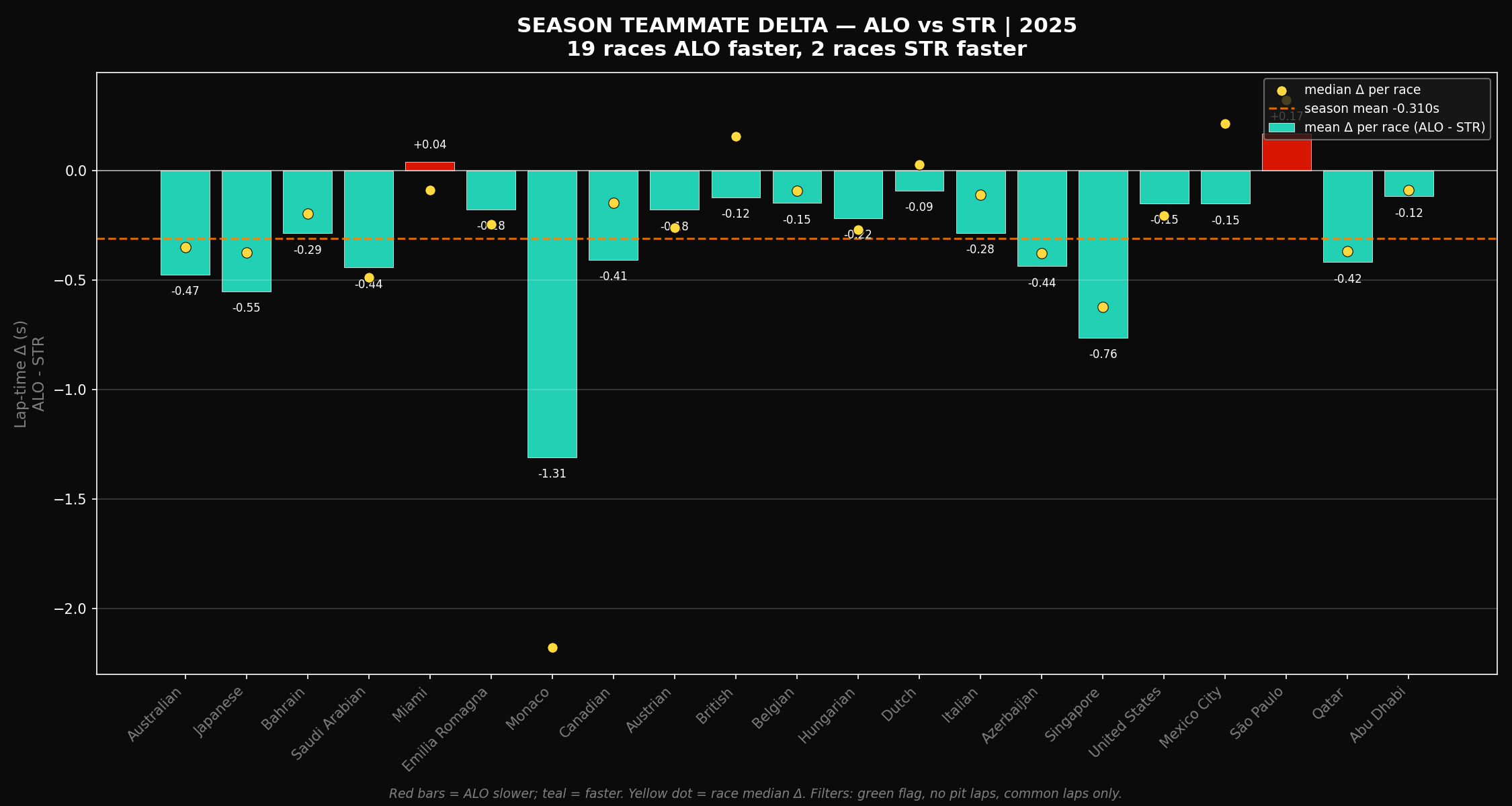
Then, made a script /f1-analysis at ./.claude/skills
Geospatial
The french real estate 5Y transaction granularity was a surprise: https://www.data.gouv.fr/datasets/demandes-de-valeurs-foncieres
head -n 100 ValeursFoncieres-2024.txt > french2024subset.txt#claude --dangerously-skip-permissions -p "ive been tinkering with geospatial data on this repository, what are you thought of it?"And blender…
I got to know about tmux this year thx to using blender.
Now i use it for AI loads.
And AI loads to generate more blender stuff: https://github.com/JAlcocerT/poc/tree/main/building-to-blender
Longer Unsupervised Tasks
im quite confident now that given a brd Ill get a decent PoC.
or actually anyof the artifacts above.
Luckily, we have PLANS.md for a while: https://developers.openai.com/cookbook/articles/codex_exec_plans
See more: https://developers.openai.com/cookbook/examples/gpt-5/codex_prompting_guide#using-agentsmd
#claude --dangerously-skip-permissions
#codex --yoloConclusions
Your manager is threatening you that you might need to do agentic stuff?
Threatening as in requirements being: lets build something agentic, you know what I mean, right?
They still dont like to sync expectations?
You can tell them that you have a PM/Pdm + Postmortem why why why that actually does their job of their full team better.
https://pm-pdm-checks.pages.dev/
git clone /poc
cd ./poc/
#npx wrangler@latest pages deploy dist-pdm-magazine --project-name pm-pdm-checks --branch main
mkdir dist-why-postmortem
cp why-postmortem-magazine.html dist-why-postmortem/index.html
npx wrangler@latest pages deploy dist-why-postmortem \
--project-name why-postmortem-checks \
--branch main
#npx wrangler@latest pages deploy dist-why-postmortem-magazine --project-name why-postmortem-checks --branch mainhttps://why-postmortem-checks.pages.dev
They will soon be a layer to remove.
What? how? who says that?
 Consulting Services
Consulting Services DIY via ebooks
DIY via ebooksflowchart LR
%% --- Styles ---
classDef free fill:#E8F5E9,stroke:#2E7D32,stroke-width:2px,color:#1B5E20;
classDef low fill:#FFF9C4,stroke:#FBC02D,stroke-width:2px,color:#FBC02D;
classDef mid fill:#FFE0B2,stroke:#F57C00,stroke-width:2px,color:#F57C00;
classDef high fill:#FFCDD2,stroke:#C62828,stroke-width:2px,color:#C62828;
classDef bridge fill:#E3F2FD,stroke:#1565C0,stroke-width:3px,color:#0D47A1;
%% --- Nodes ---
L0("Free Content
($0)"):::free
L1("AuditMagnet 🛡️
(Free Web Audit )"):::free
L11(" Blog/Youtube"):::free
L12(" ebooks"):::free
L2("DIY
(Optimization Guides) $"):::low
L3("Done With You
(Consulting) $$"):::mid
L4("Done For You
(Full Service) $$$"):::high
L44("GenBI
Shopify PoC"):::bridge
L45("Real Estate
Funnel Bot"):::bridge
%% --- Connections ---
L0 --> L1
L0 --> L2
L0 --> L11
L0 --> L12
L2 --> L3
L3 --> L4
L44 -->|Enhancing| L4
L45 -->|Enhancing| L4FAQ
Hardening a Pi for Agents
Then just choose whatever provider that allow for 24/7 queries:
https://www.kimi.com/and their kimiclaw…Qwen, deepseek…
get ready for SDD spec driven development: https://www.youtube.com/watch?v=b6cbxSaa4U4
and openspec
because context is the new code: https://www.youtube.com/watch?v=bSG9wUYaHWU
(It always was)
Matt Potcock was a great inspiration with the /grill-me
OSS Models APIs x Agents
Using Ollama with Gemma 4 is a reasonable option.
You can also get some compute or pay API use for: Kimi vs Deepseek
You also have: https://z.ai/blog/glm-5
Which is at the top of the arena for now: https://arena.ai/leaderboard/code?license=open-source
https://chat.z.ai/auth
What the…
Say thanks to:
- Huashu Design: https://skills.sh/alchaincyf/huashu-design/huashu-design
- https://github.com/Nutlope/hallmark - A design skill for Claude Code, Cursor, and Codex that refuses to look AI-generated.
- https://github.com/heygen-com/hyperframes - Write HTML. Render video. Built for agents.
$urls = @(
"https://www.youtube.com/watch?v=0EqJD2o-Mnk",
"https://www.youtube.com/watch?v=HGZOxBfnF-E",
"https://www.youtube.com/watch?v=BYpTRiRqS1Y",
"https://www.youtube.com/watch?v=8C_6qojTA78",
"https://www.youtube.com/watch?v=jqo0lVveh98",
"https://www.youtube.com/watch?v=MH-IMJxbUY4",
"https://www.youtube.com/watch?v=qsXxckCbci0",
"https://www.youtube.com/watch?v=CoPs-Bk8M9Y",
"https://www.youtube.com/watch?v=-HJg4TYBgtI",
"https://www.youtube.com/watch?v=n6SHLmKcY0E"
)
foreach ($url in $urls) {
uv run yt-distil run "$url" --no-qna -y
}or:
for url in \
https://www.youtube.com/watch?v=0EqJD2o-Mnk \
https://www.youtube.com/watch?v=HGZOxBfnF-E \
https://www.youtube.com/watch?v=BYpTRiRqS1Y \
https://www.youtube.com/watch?v=8C_6qojTA78 \
https://www.youtube.com/watch?v=jqo0lVveh98 \
https://www.youtube.com/watch?v=MH-IMJxbUY4 \
https://www.youtube.com/watch?v=qsXxckCbci0 \
https://www.youtube.com/watch?v=CoPs-Bk8M9Y \
https://www.youtube.com/watch?v=-HJg4TYBgtI \
https://www.youtube.com/watch?v=n6SHLmKcY0E; do
uv run yt-distil run "$url" --no-qna -y
doneHaving firefliesAI integrated into my logseq .md notes helps a lot:
#git clone /my-logseq-notes
make meetingReally but how
Im using a RPi
Spinning agents like
Interesting Articles
- https://larsfaye.com/articles/the-question-is-the-work
- Again - https://knowledge.insead.edu/strategy/who-killed-nokia-nokia-did Pm/PdMs…plzzz
TBC
WIP
to go with boilerplate at some poiint (?) or as ebook
Entrepre-AI Quick Spin:
git clone
make container-build
make container-upTop Questions
Just in case you want to move from employee to sth else
Understanding who sells what and that you might want more risk and upside helps :)
- https://jalcocert.github.io/JAlcocerT/questions-for-engineers/
- https://jalcocert.github.io/JAlcocerT/poc-103/#ai-engineering-blueprint-define--create
The one-page challenger sheet
“If you can’t charge more than others, it’s because you aren’t better than others.” (Hormozi)
Build the offer. Don’t drop the price.
What happenswhen you distil yt videos :)
That you can scrap shitty ideas faster, like this b2c vs b2b
The opening — 5 questions in order
- What’s the business? Who do you help?
- What are the numbers? (revenue, profit, margin, CAC, LTV, close rate, churn %)
- What do you want? (10x revenue? Exit? Sleep at night?)
- What’s stopping you? (their narrative — note it, don’t trust it)
- If we doubled lead flow tomorrow, can you handle it? — THE triage question
Numbers checklist
Required:
- Trailing 12-mo revenue
- Net profit / margin
- CAC + LTV (calculate ratio)
- Close rate
- Marketing spend (by channel + %)
- Retention / churn
- Sales velocity (units/month)
- Avg ticket / AOV
Optional but high-signal:
- Payback period
- Cash conversion cycle
- Repeat purchase rate
- Customer profile mix
Red flags table
| Symptom | Likely diagnosis | Prescription |
|---|---|---|
| Close rate >80% | Underpriced | Raise price 20-40% + guarantee |
| Close rate <10% | Offer mismatch OR cold-traffic motion broken | Add Tier-1 front-end / VSL / lead magnet |
| LTV/CAC ≈ 1:1 or worse | Attribution broken OR wrong customer | Fix tracking first, then re-evaluate |
| CAC rising w/ flat CPMs | Negative word-of-mouth | Audit reputation, fix product-market fit |
| Churn >3%/month structural | Wrong customer segment | ICP swap (see right-customers folder) |
| <20% take-rate on upsell | Offer mismatch | Restructure into Tier 1 → Tier 2 → Tier 3 ladder |
| 70%+ revenue from 1 channel | Single-channel risk | Parallel channel build + email nurture |
| Founder works <5 hrs/wk on biz | Comfort/distraction | Trade-off conversation, not tactic |
| “Need more customers” but can’t deliver | Supply-constrained mislabeled as demand | Hire + price up + capacity build |
| Revenue ≠ growing despite spend more | Creative cap OR attribution broken | Better creative + per-campaign data |
| Margin <10% | Death zone | Drop low OR go high (avoid middle) |
| Spending up = revenue up but unmeasured | No optimization possible | Attribution before more spend |
| One-trick-pony churn after delivery | Need consumables in offer | Add recurring / community / continuing-ed tier |
use the huashu skills and your creativity to define my brand kit, i have a logo on this folder and a photo of meclaude --dangerously-skip-permissions -p "see this repo where i have my kindle clippings at ./z-read-books-notes, i have destilled some of th ebooks at ./z-z-destilled, and there are some scripts to make your life easier by extracting notes form the same books. Would you be able to go through all of them and extract are the insights i highlighted? place the outputs at ./z-read-books-notes"Buckets: Stoicism, Modern Philosophy, Behavioral Econ, Persuasion, Neuromarketing/Sales, Money/Investing, Economics, Taleb-verse, Productivity, Habits, Minimalism, Psychology/Brain, Society/History, Health, Business Memoir, Fiction.
The essentialist filter — what stays (E)
For every commitment, possession, project, or input, run:
| Test | Question |
|---|---|
| Vital few | If I could only do 3 things this quarter, would this be one? |
| Trade-off | What am I giving up to do this? Worth it? |
| 90% rule | On a 0–10 scale of “yes,” is this 9+? If 7 or below → no. |
| Sleep test | Will future-me thank present-me for this? |
| Cost of yes | What good thing must this push out? |
Defaults are no. Yes must be earned.
Here is the Tl;DR of the “Hormozi Omni-Protocol.”
Think of it as the ultimate operating system for building a business that people feel “stupid saying no to.”
- The Diagnostic (The “Is it broken?” Check)
- The Triage: If you doubled leads and your business broke, you have an Operations problem. If it didn’t break, you have a Marketing problem.
- The Barbell: Stay out of the “Middle.” Either be the cheapest/automated or the most expensive/transformative. Never both.
- The Offer Engine (The “Value Equation”)
We re-engineer your product using a mathematical formula:
- Goal: Increase the Dream Outcome and Certainty.
- Goal: Decrease the Time it takes and the Effort required from the customer.
- The MAGIC Name: Give the product a name that announces the Avatar, the Goal, and the Timeframe (e.g., The 12-Week ‘Get Fit’ Founder Blueprint).
- The Sales Machine (The “Silent Salesman”)
- The VSL: A short, high-energy video that proves you’ve done it, explains the plan, and stacks the value so the price looks tiny.
- The Guarantee: Use “Teeth in the Agreement.” If they don’t get the result, you pay the price (refund or work for free).
- Damaging Admissions: Be honest about why your product isn’t for everyone to build instant trust.
- The Scale & Retention (The “Long Game”)
- The 3 Churn Cliffs: Focus entirely on the first 24 hours, 30 days, and 6 months to keep customers for life.
- One Channel: Don’t be a “jack of all trades.” Master one marketing channel (Ads, Content, or Cold Outreach) before adding a second.
- Hire to Buy Time: Only hire people once the founder is physically unable to take more sales calls.
- The “Kill-Switch”
- Red Dress Syndrome: If you’re chasing a new idea because the current one is “hard,” stop. The next one will be hard too. Confront the business you have.
In one sentence: We analyze the business for structural flaws, re-brand the offer to be irresistible using the Value Equation, and build an automated funnel (VSL) to sell it at a premium price.
From questions to forms
Its hard to achieve anything w/o disqulifying ideas/ppl.
trust me :)
Luckily, you can now:
- Programmatically create forms for your product with a psyc/business/hormozi review
#uv run python main.py create survey-consulting-qualifier.json
make create-qualifier
- Bring qualified leads towards your pocketbase instance:
#https://github.com/Raqibnur/quick-waitlist #if you dont want to setup pb, there are other projects for inspiration- Do cool D&A or just send them goodies / DRIP campaigns:
#https://github.com/JAlcocerT/leads-slubnechwile- Lead scrap + enrich with a personalized offer?
It will just allow to get the summary, so get the mp3 and use whisper:
make meeting-mp3 #get the mp3
make meeting-transcribe #use openAI to get the full summaryEvne more by having
jalcocertech-services/design-brand-kit/refined-assets/stationery/jalc-letterhead-lead-brief-v1.html
From Forms to Services Landing Pages
Whats the excuse now not to have cool landings with all the forms and lead acquisition in place?
agentssss
built with rust
he narrative arc across all four: Each post explicitly cross-references the others, so they form a coherent stack story for readers landing on any one of them.
Project Layer Position Agent OS Coding standards Captures conventions, injects them into AI coding tools (Claude Code, Cursor, Antigravity). MIT, pure markdown + bash, v3 explicitly retreated to its strongest niche. OpenSpec Coding workflow Spec-driven (/opsx:propose → /opsx:apply → /opsx:archive) across 29 AI tools. MIT, npm CLI, brownfield-first delta model. Paperclip Orchestration The company that hires NanoClaw/OpenClaw/Hermes as employees. Org charts, hard-stop budgets, board governance, multi-company isolation. MIT, Node + Postgres. Hermes Agent Assistant runtime Nous Research’s self-improving agent. 22 messaging platforms, 7 terminal backends (incl. serverless Modal/Daytona), built-in learning loop, first-class hermes claw migrate from OpenClaw. MIT, Python 3.11+. Layer map I built in the posts (each post that needs it has the same table for consistency):
┌ Orchestration ──── Paperclip ├ Assistant runtime ─ OpenClaw / NanoClaw / Hermes Agent ├ Coding standards ── Agent OS └ Coding workflow ── OpenSpec Five-design-principle treatment applied to each post (the pattern you liked from NanoClaw/OpenClaw) — surfaces each project’s opinionated claims, not just its feature list. For Hermes, I leaned heavily on the self-improvement angle and the hermes claw migrate “polite-but-clear” positioning as a successor to OpenClaw.
OpenClaw vs NanoClaw
Openclaw can be connected to tg, whatsapp, signal …even nextcloud talk
And for web search it brings DDG without apikey, but also allow interestingly to plug firecrwawl search or searxng
AgentOS
MIT | Agent OS is a system for injecting your codebase standards and writing better specs for spec-driven development.
OpenSpec
MIT | Spec-driven development (SDD) for AI coding assistants.
paperclip
MIT | Open-source orchestration for zero-human companies
Hermes
As seen recently: https://github.com/nousresearch/hermes-agent
mkdir -p ~/.hermes
docker run -it --rm \
-v ~/.hermes:/opt/data \
nousresearch/hermes-agent setuphttps://www.youtube.com/watch?v=jIP0q7HEC0g
I gave it a try with: https://aistudio.google.com/api-keys

To use it via OpenAI API: